
布式IO")

搜索")



産品描述:系統與控制(zhì)器(qì)之間(jiān)使用(yòng)動态鏈接庫作(zuò)為(wèi)中間(jiān)接口,動态鏈接庫中封裝了(le)對(duì)控制(zhì)器(qì)$的(de)各種操作(zuò)的(de)函數(shù)。在軟件(jiàn)的(de)底層硬件(jiàn)模塊中,加入對(duì)DLL中各函數(shù)的(de)調用(yòn∑g)及參數(shù)傳遞。
産品特點:
其結構如(rú)圖1所示。

圖1 硬件(jiàn)接口設計(jì)
控制(zhì)層主體(tǐ)采用(yòng)基于IEC61131-3的(de)編程标準進行(xíng)設計(jì),關鍵®要(yào)點涉及如(rú)下(xià):
(1). 圓盤控制(zhì)的(de)位置指令由外(wài)部接口通(tōng)過±10V的(de)信号給定,控制(zhì)器(qì)采集到(dào)之後進行(xíng)角度位置标定,随後轉為(wèi)實際角度值作(zuò)為(wèi)設定的(de)指令位置,模拟量的(de)輸入信号為(wèi)差分(fēn)信号;
(2). 圓盤當前實時(shí)位置的(de)更新底層由總線完成并顯示,通(tōng)過模拟量±10V标定後₩對(duì)外(wài)部接口進行(xíng)輸出,模拟量的(de)輸出信号為(wèi)差分(fēn)信号。
(3). 回參設計(jì):回參調用(yòng)控制(zhì)器(qì)內(nèi)部的(de)回參函數(shù)MC_Home完成圓盤1-圓盤5的(de)回參♣。回參具體(tǐ)原理(lǐ)設計(jì)如(rú)下(xià):
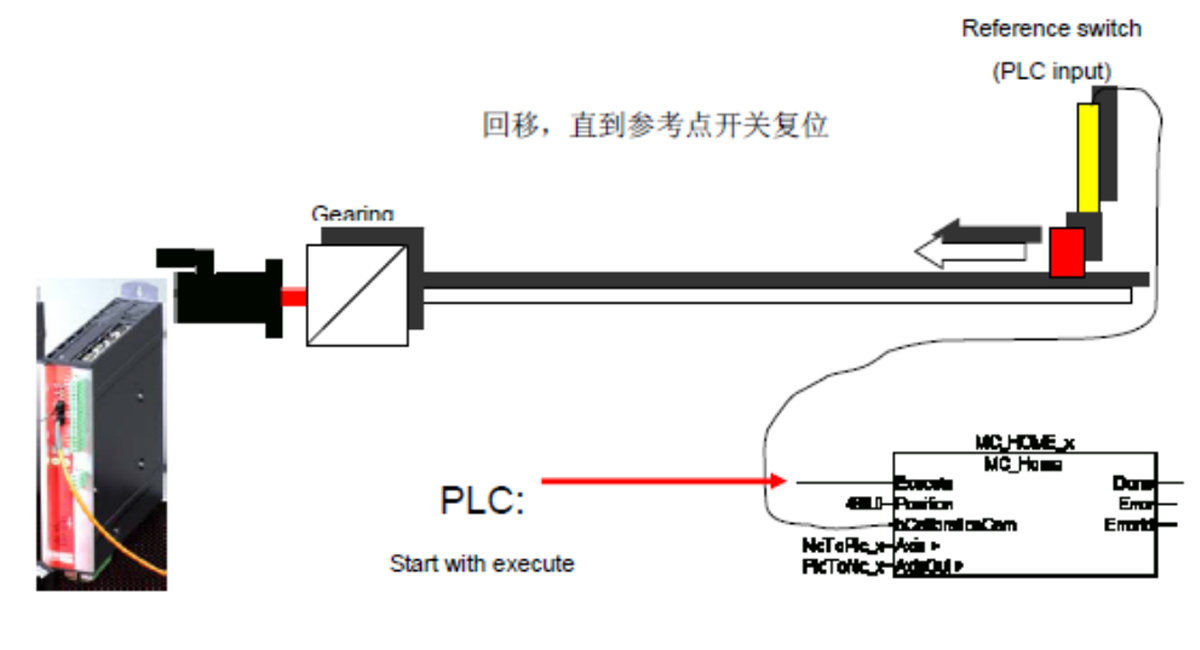
圖2 回參原理(lǐ)示意
(4). 根據項目涉及要(yào)求,各軸的(de)回參及手動/自(zì)動控制(zhì)均相(xiàng)互獨立不(bù)受影(yǐ™ng)響。
(5). 設備采集接口信号包含外(wài)部設備CAN通(tōng)訊數(shù)據幀、±10V舵角指令信号、±PWM信号;
(6). 設備輸出接口信号包含:外(wài)部設備CAN通(tōng)訊數(shù)據幀、±10mA輸出信号、4-20mA輸出信号、±10V實際舵☆角反饋信号。
上(shàng)一(yī)頁
下(xià)一(yī)頁
相(xiàng)關工(gōng)程案例
産品描述:該空(kōng)壓機(jī)系統廣泛用(yòng)于油氣化(huà)工(gōng)行(xíng)業(yè),從(cóng)傳統PLC控制(zhì)系統到(dào)基于PC控制≤(zhì)系統的(de)切換,實現(xiàn)了(le)控制(zhì)邏輯的(de)高(gāo)效管理(lǐ)前提下(xià)α,更能(néng)充分(fēn)擴展PC控制(zhì)的(de)優勢,例如(rú)CMS狀态監測、高(gāo)級語言為(wèi)基礎的(de)人(rén)機(jī)操作(zuò)軟件(jiàn)、控制(zhì)算(suàn)法層的(de)靈活擴展等等,控制(zhì)周期由原有(yǒu)的(de)10ms能(néng)夠做(zu↑ò)到(dào)1ms以內(nèi),控制(zhì)更加精準快(kuài)速。
")

産品描述:管道(dào)內(nèi)壁現(xiàn)有(yǒu)加膠塗膠工(gōng)藝現(xiàn)在均由人(rén)工(gōng)作(zuò)業(yè)完×成,工(gōng)人(rén)勞動強度大(dà),且加膠量、刮塗膠質量均得(de)不(bù)到(dào)保證。為(w£èi)解決以上(shàng)問(wèn)題,特研發加膠刮膠系統一(yī)套,對(duì)整個(gè)加膠刮膠過程實現(xiàn)自(zì)動≈化(huà)。

電(diàn)話(huà):027-87886081(同傳真)
郵箱:trust_service@trustmc.cn
地(dì)址:武漢市(shì)東(dōng)湖(hú)新技(jì)術(shù)開(kāi)發區(qū)民(mín)院路(lù)以西(xī)龍安港彙城(chéng)A幢26層D19
CopyRight © 武漢新夢達科技有限公司 All Rights Reserved. 京ICP證000000号 SEO




